x
x

相关产品





产品介绍
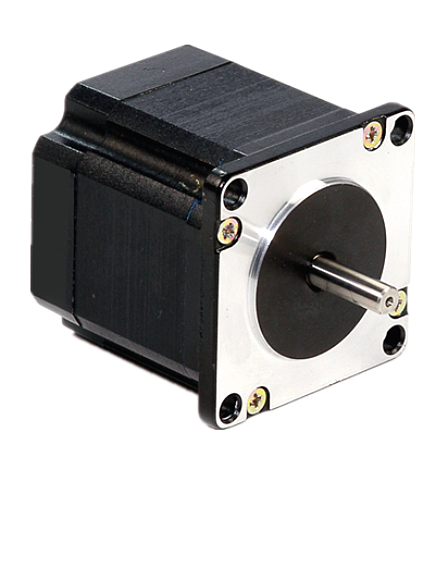
高精度步进电机
框架尺寸NEMA 23
步角0.45°
高达140 oz-in(0.99 N-m)的保持力矩
步进电机将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为"步距角",它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
规格参数
型号 | NEMA | 步角 | 连接 | 长度 mm | 电流 A | 保持力矩Nm | 抵抗性 | 惯性 oz-in2 | 重量 lbs | 引线数量 |
5704X-01 | 23 | 0.45° | 双极 | 1.73 (44) | 1.50 | 75 (0.53) | 3.00 | 1.00 | 1.05 | 4 |
5704X-02 | 23 | 0.45° | 双极 | 1.73 (44) | 1.80 | 75 (0.53) | 2.00 | 1.00 | 1.05 | 4 |
5704X-10 | 23 | 0.45° | 双极 | 1.73 (44) | 0.90 | 75 (0.53) | 9.60 | 1.00 | 1.05 | 4 |
5704X-15 | 23 | 0.45° | 双极 | 1.73 (44) | 2.50 | 75 (0.53) | 1.30 | 1.00 | 1.05 | 4 |
5704M-02 | 23 | 0.45° | 双极 | 2.17 (55.0) | 1.80 | 140.0 (0.99) | 3.10 | 2.10 | 1.50 | 4 |
5704M-03 | 23 | 0.45° | 双极 | 2.17 (55.0) | 3.00 | 140.0 (0.99) | 1.20 | 2.10 | 1.50 | 4 |
5704M-10 | 23 | 0.45° | 双极 | 2.17 (55.0) | 0.90 | 140.0 (0.99) | 11.70 | 2.10 | 1.50 | 4 |
 津公网安备12010102000946号
津公网安备12010102000946号