当前所在位置: 首页 > 产品首页 >检测、测量 、自动化、工业IT >自动化、工业IT >自动化 >EVO LOGICS自主水下航行器Quadroin AUV


EVO LOGICS自主水下航行器Quadroin AUV
- 品牌:EVO LOGICS
- 型号:Quadroin AUV
- 下载: EVO LOGICS自主水下航行器Quadroin AUV.pdf
- 阅读次数:759







产品介绍
Quadroin 是具有低阻力仿生设计的下一代 AUV。
自 1980 年代以来,EvoLogics 的创始人 Rudolf Bannasch 博士研究了阿德利企鹅及其高效的运动方式,曾多次前往南极进行实地考察,并在风洞和水箱中进行了大量实验。以企鹅为蓝本的创新纺锤形流体,在水中实现超低阻力系数。
技术设计选择保持了理想化的企鹅状身体的形状和轮廓,没有突出部分,以促进高阻力效率。该 AUV 由四个后推进器驱动,具有良好的水动力性能和机动性。它的速度高达 10 节,并且非常节能。
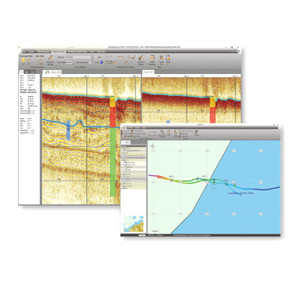
第一个实际应用包括由 EvoLogics 与 Burkard Baschek 教授在德国 Helmholtz-Zentrum Hereon 期间设计的一组(max)10 个 Quadroin AUV,用于监测海涡中的水流和养分通量。为此,Quadroins配备了特殊的多参数探头(由Sea & Sun Technology定制)并经过训练,可以在编队飞行中连续扫描不同深度的水柱。
性能特点
- 以高达 5 m/s 的速度快速且可操作
- 推进系统包括 4 个 X 形配置的水平推进器
- 组合式自动折叠天线增加了地面的续航能力和通信范围
- 带有 WiFi、868 MHz 无线电和 GNSS 的地面通信模块
- 内置 S2C M 18/34“迷你”调制解调器,带有流线型天线罩,用于水下通信和定位
- 各种传感器和仪器的有效载荷能力
- 大功率闪光灯,便于定位和恢复
技术参数
工作深度:150 m
运行速度:高达 5 m/s
耐力:2 m/s 下超过 10 小时
电源
电源:内部可充电锂离子电池
电池容量:1 kWh
充电时间:少于 6 小时
仪器
UW 通信和定位:S2C M 18/34 声学调制解调器,最高 13.9 kbit/s
导航:GNSS、AHRS、深度传感器、LBL 定位、可选 DVL
全球导航卫星系统:全球定位系统、全球导航卫星系统
无线电通信:WiFI 2.4 GHz,863-870 MHZ ISM 调制解调器(可选 GSM 或铱星)
集成 AHRS:集成 xSens MTi 30
机载电脑:
I.MX 6ULL 单核 ARM Cortex-A7,792 MHz,512 MB RAM,64 GB内存(SD 卡),附加 µController(可通过 Jetson Xavier 升级NX处理单元)
有效载荷
有效载荷选项:前视声纳、侧扫声纳、前视水下相机、物体识别硬件和软件、CTD
有效负载能力:高达 3 kg
尺寸:长度 1082 毫米,max. Ø 293 毫米
空气/浮力重量:小于 25 公斤/待定
 津公网安备12010102000946号
津公网安备12010102000946号