x
x
基于Ranger3相机的激光镜头搭建步骤介绍
阅读次数:180 发布时间:2024-09-05 15:08:25
Ranger3 是SICK一款高速高精度分体式3D相机,广泛应用于轨道交通、电子、轮胎等多个行业。因为其速度快、精度高、体积小巧、方便安装而被广大客户所喜爱。
而它最大的特点其实是用户可以依据需要的视野、景深、精度等进行分体式搭建和封装,让它可以依据实际应用场景进行特殊打造。
Ranger3相机是基于激光三角原理进行3D成像的,故需要激光和镜头组成一个成像系统后进行使用。而不同的激光、镜头以及相对位置调节即可组成各种应用需求,这也要求用户对激光、镜头选型以及整体搭建有一定了解。
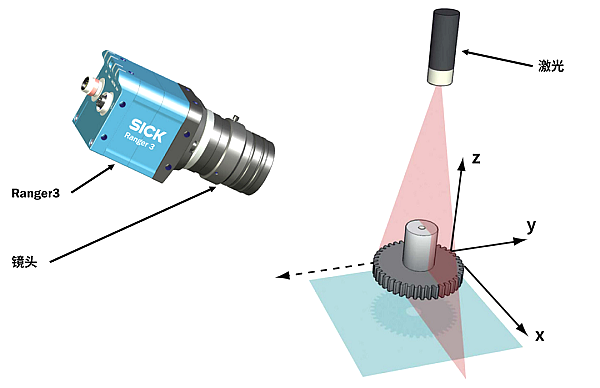
本文也将给大家介绍下基于Ranger3的激光和镜头如何安装。
Ranger3使用搭建步骤
在用户使用Ranger3搭建之前必须确认至少如下信息:
►需要的视野宽度;
►相机相对扫描物体的工作距离:景深和Z向精度当然也非常重要,这个与相机和激光的相对位置关系,激光和镜头夹角等密切相关,很大的景深还需改变芯片和镜头的夹角(沙姆角)。
常规Ranger3使用步骤如下:
1、确定镜头的焦距
依据芯片尺寸信息、需要的中间视野、相机工作距离可以大致确定镜头的焦距(简化为下图所示的相似三角形计算)。
基于此焦距选择近视的标准镜头焦距:焦距越大,视野越小。
2、按镜头选型参数确定镜头其他参数
3、依据需要的景深、精度等确定架构
注:激光和相机之间的距离a,激光和镜头的夹角α,镜头和芯片的夹角β,这三个参数基本上可确定整体的架设,其中激光可沿其轴线方向适当移动。
4、实际搭建对应效果
实际搭建对应效果,如不确定激光具体工作参数可先采用常规可调工作距激光进行搭建,查看对应的视野、景深等情况。
5、确定激光工作距离和其他参数
6、依据上述参数和架构进行最终的测试
7、封装(如有需要)
- 上一篇: GASTRON比色气体探测器ChemLogic 8
- 下一篇: MPT列阵检测技术解析与应用实例



 津公网安备12010102000946号
津公网安备12010102000946号